
Simulateur robotique Azolla
Introduction
Azolla est un simulateur 2D de robot mobile. Avec ce simulateur, nous pouvons concevoir les règles de navigation d'un ou plusieurs robots dans un monde en 2D.
Les règles sont conçues à l'aide de script Lua. C'est un langage de script intégrable puissant, rapide et léger. Utiliser Lua nous offrira de nombreux avantages dans la conception d'algorithmes pour les robots mobiles.
L'éditeur de monde est graphique et intuitif. Les utilisateurs peuvent créer un environnement pour tester les robots en utilisant la souris.
Le robot
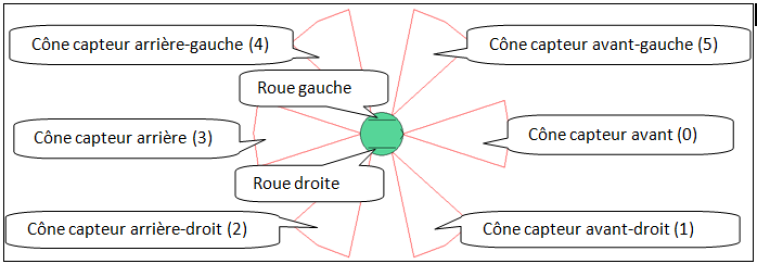
Les méthodes d'Azolla
a programmation du robot Azolla se fait en langage Lua : http://www.lua.org/
readsensor(integer index) : accepte l'indice de capteur; renvoie la distance mesurée du robot actif.
setspeed(integer left, integer right): accepte la vitesse de la roue gauche et droite du robot actif; ne renvoie rien.
getangle() : accepts nothing; returns the current angular position of the active robot (in radians).
getnumofrobots() : accepts nothing; returns number of existing robots.
getposition() : accepts nothing; returns x and y position of active robot.
gettarget(int index) : accepts index of target; returns x and y position of selected target.
textline(string msg) : accepts the message to be displayed; returns nothing.
setactiverobot(integer index) : activates a certain robot.
stepforward() : runs simulation one time step.
Archive contenant le logiciel (portable) et des programmes d'exemple




