
COZMOBrancher votre smartphone au Raspberry PI, ouvrir l'application COZMO.
Activer le SDK :

 en haut à droite
en haut à droite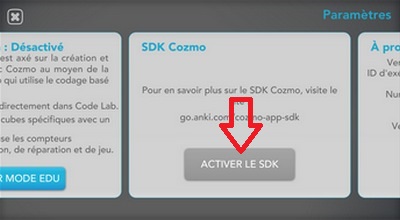
ACTIVER LE SDK
Maintenant il suffit de saisir son code python dans l'IDE Thonny du Raspberry PI et le tester.
COZMO parleTestez ce code en python :
import cozmo
def bonjour(robot: cozmo.robot.Robot):
# utilisation basique
robot.say_text("Salut la compagnie !").wait_for_completed()
# générer une voix humaine
robot.say_text("Salut la compagnie !", False, use_cozmo_voice=False).wait_for_completed()
# voix humaine et cozmo joue une animation
robot.say_text("Salut à tous ! Je parle en bougeant.", True, use_cozmo_voice=False).wait_for_completed()
# modification de la vitesse et hauteur de voix
robot.say_text("Salut à tous ! On se dépêche !", False, voice_pitch=-5, duration_scalar=0.2, use_cozmo_voice=False).wait_for_completed()
cozmo.run_program(bonjour)COZMO se déplaceTestez ce code en python :
import cozmo
from cozmo.util import degrees, distance_mm, speed_mmps
def cozmo_program(robot: cozmo.robot.Robot):
# Use a "for loop" to repeat the indented code 4 times
# Note: the _ variable name can be used when you don't need the value
for _ in range(4):
robot.drive_straight(distance_mm(150), speed_mmps(50)).wait_for_completed()
robot.turn_in_place(degrees(90)).wait_for_completed()
cozmo.run_program(cozmo_program)Vous pouvez tester d'autres codes pour découvrir d'autres possibilités du robot COZMO.
pycozmoLe module pycozmo permet de piloter le robot COZMO sans utiliser de smartphone, directement avec une connexion Wi-Fi.
Voici comment l'installer :
Ouvrez la console des lignes de commandes en cliquant sur  .
.
Ou allez dans  , puis Accessoires, et choisissez LXTerminal.
, puis Accessoires, et choisissez LXTerminal.
Puis saisissez la ligne de commande :
pi@raspberry:~ $ sudo pip3 install pycozmo
Autre méthode :
pi@raspberry:~ $ git clone https://github.com/zayfod/pycozmo.git
Puis,
pi@raspberry:~ $ cd pycozmoEt enfin :
pi@raspberry:~/pycozmo $ sudo python setup.py install
Avant de coder connecter le réseau du Raspberry à celui du robot COZMO, le mot de passe s'affiche sur l'écran du robot.
Voici des exemples de codes:
import time
import pycozmo
def pycozmo_program(cli):
cli.set_head_angle(angle=0.6)
time.sleep(1)
pycozmo.run_program(pycozmo_program)ou encore
import pycozmo
cli = pycozmo.Client()
cli.start()
cli.connect()
cli.wait_for_robot()
cli.drive_wheels(lwheel_speed=50.0, rwheel_speed=50.0, duration=2.0)
cli.disconnect()
cli.stop()Voici le lien Github pour avoir quelques exemples : LIEN vers Github.
Le défaut de ce module est qu'il est moins complet que le module officiel.